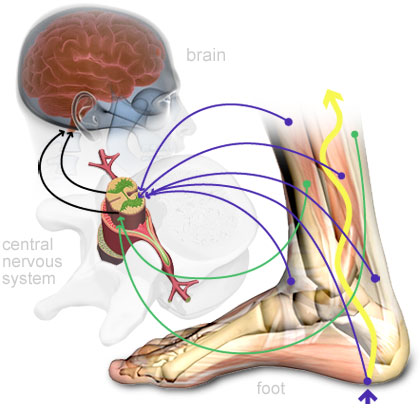
La propriocepción es el sentido que informa al organismo de
la posición de los músculos, es la capacidad de sentir la posición relativa de
partes corporales contiguas. La propiocepción regula la dirección y rango de
movimiento, permite reacciones y respuestas automáticas, interviene en el
desarrollo del esquema corporal y en la relación de éste con el espacio,
sustentando la acción motora planificada. Otras funciones en las que actúa con
más autonomía son el control del equilibrio, la coordinación de ambos lados del
cuerpo, el mantenimiento del nivel de alerta del sistema nervioso y la
influencia en el desarrollo emocional y del comportamiento.
Esta definición proviene del artículo propiocepción de la
Wikipedia en español. Define la introducción de como se afecta en karate el
impacto o lesión de los mecanismos que informan al cuerpo de su posición en el
espacio.

Por extensión todas las técnicas de karate realizan, si son
aplicadas con la suficiente energía, oportunidad y localización, una
perceptible merma en el oponente de su propia concepción del espacio. Es
palabras más simples, se le noquea. Hay lugares del cuerpo que son más
susceptibles de realizarlo, por ejemplo la cabeza, por la situación de los
canales vestibulares y su inervación. Pero en concreto, en este artículo, se
quiere incidir en la rodilla por su relación con el equilibrio del cuerpo.
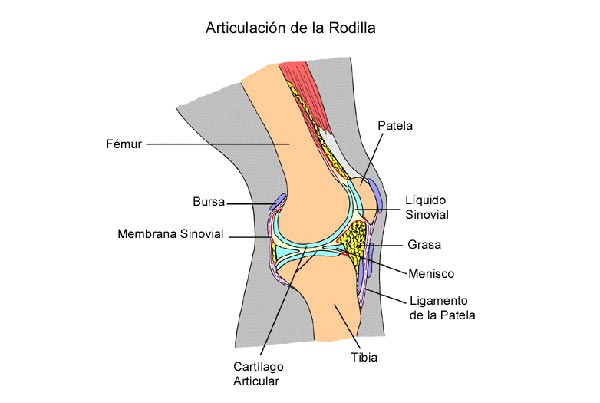
La rodilla humana posee una variedad de tendones, cámaras
sinoviales, y huesos que la hacen particularmente sensible a las lesiones
deportivas, incluyendo las marciales, y que la hace un verdadero objetivo a la hora de atacar y dejar
inutilizado un oponente.
Para ello, en karate se disponen, codificadas en los katas
de karate, de una serie de técnicas que a continuación se listan:
-
En el kata Sanseru (Goju-ryu y Shito-ryu), se
realizan en las cuatro direcciones una patada llamada fumikomi-geri,
específicamente dirigida a la rodilla.
-
También en el kata Sanseru (Goju-ryu y
Shito-ryu), concretamente en las primeras técnicas del kata, se realiza un giro
con golpe a la zona de la rodilla con el objeto de girar la pierna y
desequilibrar al oponente.
-
En las katas de Bo se hacen atemis o golpes los
cuales van dirigidos a nivel bajo o gedan, que tienen como objetivo la rodilla
o, en su defecto el tobillo del oponente, el cual lesionado provocará su caída
o falta de movilidad.
¿Por qué atacar la rodilla del oponente?
La rodilla,como todo el cuerpo humano y, en especial, la
articulaciones, tiene diversos elementos que la hacen especialmente sensible a
una lesión o ataque:
-
Posee mecanorreceptores que actúan como
transductores que informan al cerebro de la posición de los músculos, de su
tensión y relajación, en suma de la concepción de como el cuerpo esta situado
en el espacio.







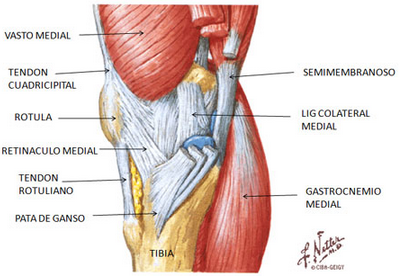


-
Están situados sobre los tendones de la misma
una serie de puntos de acupuntura importantes, tales como Estómago 34, Estómago
36, Hígado 8 y Vesícula Biliar 34. Todos estos puntos hacen referencia a la
movilidad de la rodilla al estar situados en o cerca de tendones.





-
Está muy inervada al ser el paso de paquetes de
nervios que conducen las señales de situación de otra parte del cuerpo rica en
mecanorreceptores, como el tobillo, otro objetivo de los ataques marciales que
se realizan en Bo.
Uno de ellos es nervio femoral.


¿Cómo efectuar un correcto fumikomi-geri?
Por mi experiencia personal, después de pasar por el estilo
shito-ryu al goju-ryu, puedo decir que el proceso que creo más correcto seria
el siguiente:
1-
Comenzar desde una posición estable
anatomicamente, tal como moto-dachi o sanchin-dachi. No aconsejo el
zenkutsu-dachi debido a que es una posición demasiado baja.
2-
Con los brazos en guardia, elevar lo posible la
pierna hasta que la rodilla esté los más próxima al nivel de la cintura. El pie
que ataca debe girarse hacia el interior del cuerpo para poder tensarlo
adecuadamente.
3-
Bajar la pierna, atacando con el pie (siempre tensado
retraído hacia el interior, sobresaliendo la zona externa del talón) a la
rodilla, en la articulación, en su cara interna o externa. En su defecto pueden
atacarse zonas inmediatamente inferiores de la pantorrilla. Éste proceso debe
acompañarse de una ligera descarga del cuerpo hacia abajo en el momento del
impacto, quizás lo más difícil de conseguir. Atención: no inclinar el tronco
hacia atrás en la realización dela técnica, debido a la división de energía
cinética que eso conlleva.
4-
Retrotraer la pierna a su posición elevada con
la rodilla al mismo nivel que la cintura.
5-
Bajar la pierna o retrocederla a una posición
segura.

Los efectos conseguidos resultan de una aplicación vigorosa
de una fuerza de 20Kp con la pierna, que, sumado el peso del defensor, provocan
que la rodilla del oponente se doble dañando con ello los tendones y sus
mecanorreceptores, además de forzar la articulación. Se consigue con ello que
el oponente vea mermada su conciencia de equilibrio o propiocepción, cayendo al
suelo o siendo mermado su equilibrio.
Una aplicación todavía más vigorosa y violenta podría romper
los tendones y provocar la salida de líquido sinovial fuera de las cápsulas que
lo encierran para el normal funcionamiento de la rodilla.
Aconsejo desde éste atril la práctica responsable de la
artes marciales, sin dañar al oponente y compañero y siempre respetándolo. El respeto y el amor al prójimo deben ser, y
son, más importantes que una correcta ejecución de las técnicas.
Bibliografia:
Bunkai de sanseru.
Kata sanseru.
Propiocepción en robots.

